

Waymo Driver是Waymo今年早期在舊金山的自動駕駛系統,從 2009 年開始首次在城市自動駕駛,當Waymo駕駛在數十輛車輛和行人當中時,遇到了各種各樣的道路使用者,像是停放車輛的人,騎摩托車穿出的人,忽然超車等等,像這樣的情境 Waymo 已經歷了數萬次。
任何完全自動駕駛系統都需要知道車輛行駛到哪和要去哪, 要在錯綜複雜的十字路口、不斷變化的佈局中安全駕駛,也要能預測其他道路使用者正在如何移動,每一項環節都會是駕駛在密集的城市中的一大挑戰。
而Waymo 發表其設計技術可以應對各種複雜的情況。並擴大在舊金山的測試範圍,目前Waymo每周行駛超過 100,000 英里。
以下4大部分的策略是幫助 Waymo 取得進步的關鍵:
(1) 先進的感測器
運用建造先進的傳感器與感知系統,通過超過2000萬英里的自動駕駛和第五代的開發,為Waymo Driver 提供更高質量的數據以產生更先進的人工智能和軟體。
目前第五代 Waymo Driver 是Waymo迄今為止功能最強大的系統,專駕駛於複雜環境而設計。由包括 radar 、 lidar 和攝像頭在內的互補傳感器組成,即使在雨霧等惡劣天氣條件下,也能在白天和黑夜 360 度全方位觀察車輛。
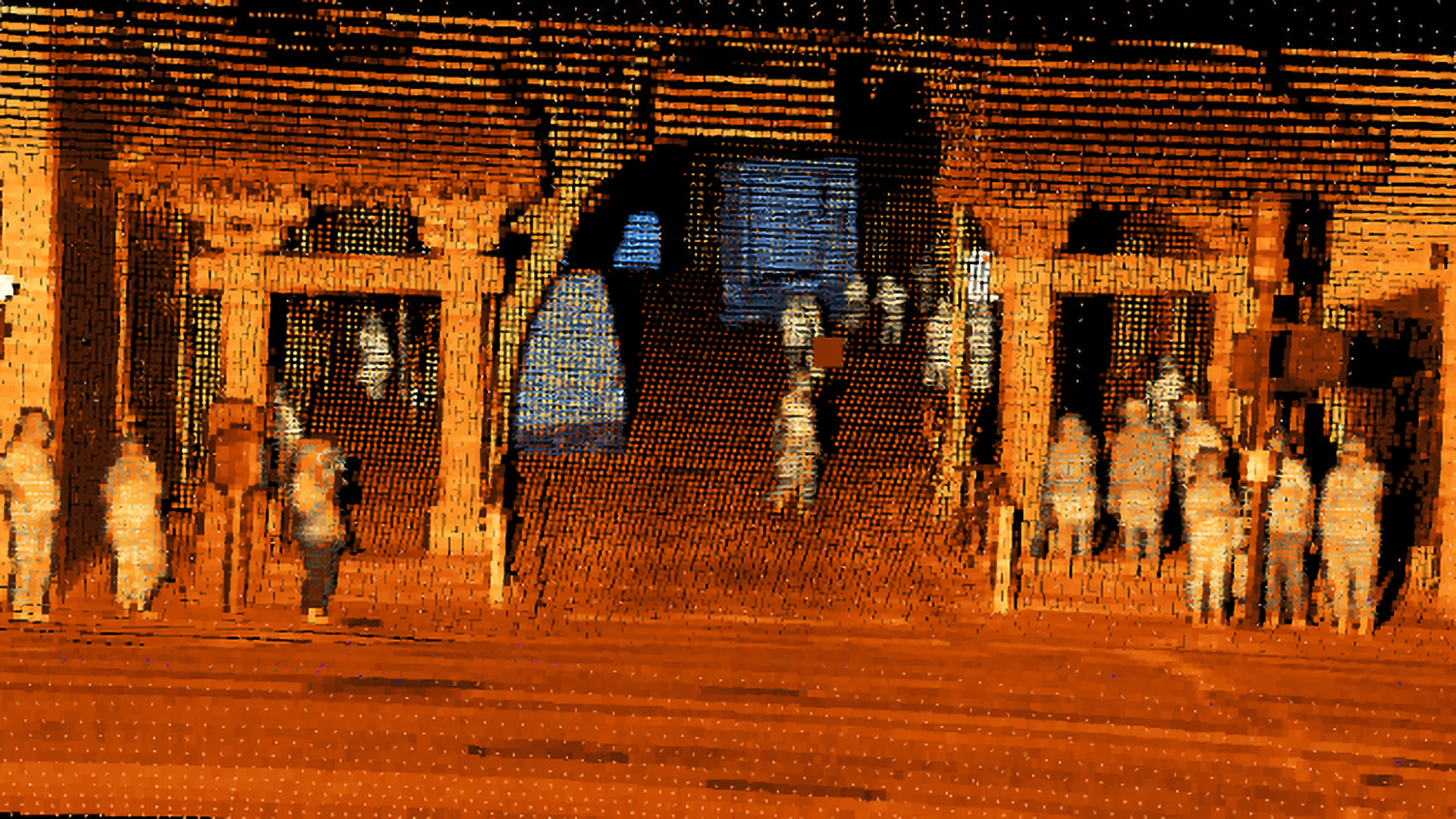
這些傳感器組合,能夠在駕駛於城市街道中準確地追蹤周圍的物體,例如在下圖,在左轉進入 16 街。 而且由於傳感器能提供的長距離和高密度的訊息,Waymo Driver 可以精確且智能的檢測物體和遠處的運動,例如發現卡車在行駛中緩慢下來, 有人準備從中跳出車外,輸送包裹等等情境。
而重要關鍵,是來自一套傳感器的數據,能使全自動駕駛安全地處理各種情況。如Camera-only systems可能會遇到惡劣的天氣和光線不足的情況。
這就是 lidar 系統的優勢所在。與傳統汽車雷達不同,第五代成像雷達可以檢測城市駕駛中常見的靜止和移動物體,快速檢測從停放車輛後面突然出現到街道上的行人。雷達數據還可以幫助 Waymo Driver 更準確地判定,例如,從在行進間,遇到有蒸汽從路面穿出,車子不會判定是障礙物,而是可以穿越的,就算在能見度很差的情況下,Waymo也可以繼續安全駕駛。
由於 radar 、 lidar 和攝像頭傳感器的輸出融合在一起,機器學習模型可以更智慧的推測不同情境。當攝像頭檢測到停車標誌,lidar也可以幫助確定是否是某家店面的反射物件。
再來是強大的車載計算平台,讓 Waymo Driver 處理大量數據,並在機器學習 (ML) 模型上運行,無需額外的人工輸入即可立即做出反應,例如當救護車接近時,或狗奔跑時出來到街上。 此外,即使 Waymo Driver 進入隧道中,也知道該做什麼。
(2)擁有強大的機器學習和評估基礎。
Waymo 每個主要部分,無論是感知、語義理解、行為預測還是規劃,都利用了機器學習模型,而這些模型提供了大量的駕駛體驗和傳感器收集的豐富數據。
基於多年的 AI 研究,Waymo也開放Waymo Open Dataset 數據計劃,不斷擴展計劃,從感知到預測,不斷創新並突破最先進的 AI 研究的界限,來建構出最先進的 ML 模型,處理這些在駕駛中的複雜性。
Waymo Driver 在公共道路上自動駕駛超過 2000 萬英里,並在進行了超過 200 億英里的模擬,Waymo Driver 也透過機器學習模型觀察並學習許多當地駕駛的細微差別,能調整出適應當地的駕駛特徵。
例如,在舊金山的駕駛,Waymo Driver 了解到居民在上陡坡時通常會開得稍微慢一些。因此,基於學習經驗,並根據交通的速度和流量,Waymo Driver 也確實為舊金山人提供了一種熟悉和舒適的體驗,可以在城市的眾多的山丘中安全穿行。 Waymo Driver 系統正在學習許多對其他道路使用者來說很直觀的細微行為,這對於建立當地居民對技術的信任非常重要。
機器學習模型需要經過大量整理的數據以及大量訓練和評估計算。Waymo就是在這基礎設施和框架上,進行大量投資,快速訓練評估ML 模型,以及指標、工具、模擬環境(例如 Simulation City)來評估 Waymo Driver 的整體性能。
(3)將經驗與技術結合
Waymo計畫性的在多種環境中運行,從城市到高速公路,從中匯集經驗來強大自己技術,在亞利桑那州(Arizona)開發的無人駕駛的叫車服務體驗,於 2020 年 10 月首次對公眾開放全自動服務,提供數以萬計的安全服務,並獲取到寶貴現場數據,來支持其安全評估和技術框架。
下方是 Waymo Driver如何學會在停車場時判斷的情境:

Waymo Driver在舊金山擁有多年的經驗,這使得可以應對各種駕駛挑戰,雖然每個城市和駕駛環境的具體情況有所不同,但有這些實際構建、評估和操作,未來的進步將變得更加高效和令人期待的。
(4)專注在Full autonomy
Waymo以專注於自駕車挑戰中最困難的部分,直接朝向於無需人駕駛的階段為主目標,在構建不依賴人類駕駛員的情況下運行的系統。系統要不是可以完成整個行程,要不就是不能。誰在控制和負責駕駛安全,從來沒有任何混淆。
作為唯一一家在美國運營完全自主的公共乘車服務的公司,確切地知道實現完全自主需要什麼,並根據需要在其他城市測試相應地設計路線圖。目前隨著 Waymo繼續構建新功能,正持續擴大在全國各城市自動駕駛的機會。
文章翻譯出處:
https://blog.waymo.com/2021/08/MostExperiencedUrbanDriver.html